International Space Station (iss)
mobile servicing system [mss]
The MSS is mounted on the Integrated Truss Structure [ITS] - From segment P3 to S3
The MSS is mounted on the Integrated Truss Structure [ITS] - From segment P3 to S3
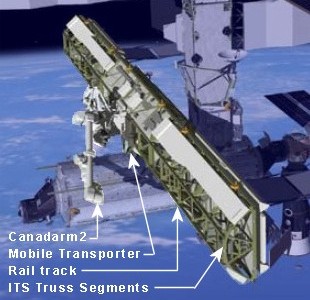
The Mobile Servicing System [MSS] is the first railroad built in space. it consists of a pair of tracks, forty meter long, running along the front of the Integrated Truss Structure [ITS]. The rails extend from the outer end of the P3 truss segment to the outer end of the S3 truss segment.
Rail cars which can carry personnel, equipment and the station robot arm (Canadarm2) run along the tracks. This saves time during space walks and allows the movement of large items.
The main functions of the MSS are:-
* Assist the movement of equipment and supplies around the Station
* Support space walkers working on the exterior of the Station
* Service instruments and equipment on the exterior of the Station.
* Increase the flexibility and reach of the station robot arm (Canadarm2)
1. Mobile Transporter [MT]nbsp; ▼
2. Mobile Base System [MBS] ▼
3. Crew and Equipment Translation Aid Cart A. [CETA-A] ▼
4. Crew and Equipment Translation Aid Cart B. [CETA-B] ▼
5. Space Station Remote Manipulator System [SSRMS] (Canadarm2) (When attached to the MBS) ▼
6. Special Purpose Dextrous Manipulator [SPDM] (Dextre) (When attached to the MBS or the end of Canadarm2) ▼
References:
CSA: Canadarm2, Dextre, Mobile Base
NASA: MSS
Wikipedia: Canadarm2, Dextre
rdata space: Canadarm2 and Dextre
The Mobile Transporter [MT] is a rail car mounted on a track on the forward face of the Integrated Truss Structure (ITS). The track spans from ITS segment Starboard 3 to Port 3.
The MT carries the Mobile Base System [MBS] which connects to the SSRMS (Canadarm2) and/or the SPDM (Dextre) to move them along the ITS when required.
The MT was delivered to the station, already permanently attached to the ITS S0 truss segment of the ITS, by U.S. Space Shuttle mission STS-110 [Flight 8A] in October 2002.
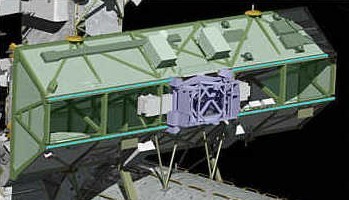
The Mobile Base System [MBS] was built by the Canadian Space Agency (CSA). It is mounted on an U.S. provided Mobile Transporter (MT) and has four grapple fixtures so that it can serve as a base for the SSRMS (Canadarm2) and the SPDM (Dextre) simultaneously.
The MBS can move key elements to their required work site by sliding along a track system mounted along the Integrated Truss Structure (ITS).
The MBS was delivered to the station by U.S. Space Shuttle on mission STS-111, [Flight UF-2], June 2002. It was then mounted on the MT.
The Crew and Equipment Translation Aid Carts (CETA) are rail cars mounted on tracks running along the front of the Integrated Truss Structure [ITS]. They use the same tracks used by MT.
The CETA carts act as mobile platform for space walkers and their equipment during external assembly and maintenance work. There are two carts, CETA A and B, which are usually mounted on the starboard (right) and port (left) sides of the MT. They can, however, be disconnected and moved, by the SSRMS, to the same side. This allows the MT to move to the end of the rail track.
CETA cart A was delivered to the station by U.S. Shuttle mission STS-112, [Flight 9A], in October 2002 and installed on the starboard side of the ITS.
CETA cart B was delivered to the station by U.S. Shuttle mission STS-113, [Flight 11A], in November 2002 and installed on the port side of the ITS.
The MT normally blocks the carts from operating side by side. Either cart, however, can be detached from the rails, moved and re-attached on the same side as the other.

The station "robot arm", called Canadarm2, is the main component of the Space Station Remote Manipulator System [SSRMS]. It played a critical role in the assembly of the station and is now use for maintenance and logistic operations. It was built by the Canadian Space Agency.
Canadarm2 can be attached various point around the ISS and operated by crew inside the station. When connected to the Mobile Base, it becomes a component of the MSS
Canadarm2 is a larger version of the U.S. Space Shuttle "robot arm" and consists of three sections connected with universal joints to allow movement in any direction. Each end of Canadarm2 has identical fittings to connect it to attachment points on the station modules and the Mobile Servicing System [MSS]. The arm is operated by crew inside the station.

The SPDM, called "Dextre", is a small two-armed robot capable of handling delicate assembly tasks to reduce the workload of astronauts on space walks.
Its dual-arm design provides added flexibility where precise handling is required. It can remove and replace smaller components on the Station's exterior.
Dextre was built by the Canadian Space Agency (CSA) and is controlled by the crew inside the Station.
Dextre can be connected directly to the Mobile Base [MB] where it becomes part of the MSS. It can also be attached to the end of the SSRMS (Canadarm2) and becomes part of the MSS if Canadarm2 is connected to the MB.
The following table compares the specifications of the three Canadian built components of the MSS.
| Component | SSRMS | MBS | SPDM |
| Arm Length | 17.6 m (57.7 ft) | 5.7 m x 4.5 m x 2.9 m (18.7 ft x 14.76 ft x 9.5 ft) |
3.5 m (11.48 ft) linear stroke |
| Mass (approx.) | 1,800 kilograms (3,968 pounds) |
1,450 kilograms (3,196.7 pounds) |
1,662 kilograms (3,664 pounds) |
| Mass Handling / Transportation Capacity | 116,000 kilograms (255,736 pounds) |
20,900 kilograms (46,076.61 pounds) |
600 kilograms (1,322.77 pounds) |
| Degrees of Freedom | 7 | Fixed | 15 |
| Peak Power (operational) | 2,000 W | 825 W | 2,000 W |
| Avg. Power (keep alive) | 435 W | 365 W | 600 W |
| Applied Tip Load Range | 0-1,000 N | N/A | 0-111 N |
| Stopping Distance (under max. load) | 0.6 m (1.96 ft) | N/A | 0.15 m (5.9 inches) |
